Module cybergrape::report
source · Expand description
Our final report for the CyberGrape project
§Background
Our project consists of a system of tactile blocks that represent audio sources, or audio blocks, that track their angle and movement relative to a central block, called the listener block. As audio blocks and the listener block move relative to each other, their relative angles are recorded. A software pipeline should be able to either encode the streamed positional data into a well-defined serialization format or create spatial audio directly using user-provided audio data.
This was achieved through the use of two Bluetooth 5.1 XPLR angle-of-arrival antenna boards and their sister tags. The tags, which emit Bluetooth signals, were placed in the audio blocks. Two antenna boards were placed in the listener block to encode a 360-degree range of positional data capture, managed by a Raspberry Pi Pico W. The angle-of-arrival data is transmitted from the listener block to a central computer, at which point it can be interpreted by a Rust software pipeline. Depending on user-provided instruction, the software pipeline either writes the recorded positional data to our serialization format or uses it to mix provided audio files into a single, two-channel binaural audio file.
§Requirements
-
Sample and record positional data using an embedded system that takes advantage of Bluetooth 5.1 angle-of arrival capabilities
-
Design a serialized file format that can encode positional data in an efficient and logical way for use in sound spatialization work, both within our system and without
-
Deliver a software pipeline that, given recorded positional data, can binauralize separate audio streams, framewise, into a single stereo audio file
§Minimum Viable Product
The minimal version of this project has a hardware component and a software component.
The hardware system consists of a central listener block and multiple source blocks. The hardware must be able to communicate the positions of each source block relative to the listener block with enough accuracy to convince a human listener that audio is coming from the direction they placed the source block in during playback.
The software component must be able to receive positional data from the hardware system, then use a binauraliser to mix multiple audio files into a final sound file. The mixed file should provide a convincing surround sound experience where each input audio stream is pinned to the location of a particular tag, following its position in the spatial audio landscape.
On startup, the software must provide some kind of interface to set up the input audio files and their mappings to the source blocks. This interface can be either a TUI or a proper GUI.
§Deliverables
The sponsor received the listener block, tags, and access to the CyberGrape codebase. The listener block is built out of laser cut 3mm plywood, and contains two U-blox AoA antennas, a Raspberry Pi Pico, and a serial-to-USB adapter. The electronics are soldered to a stripboard. The “tags” are bluetooth-emitting devices provided by U-blox, and are tracked by the AoA antennas; they serve as the source blocks.
The listener block can be connected to a computer with a USB cable, then the CyberGrape software can interface with the hardware. The software is a Rust codebase that can collect serial data from the listener block, then either output serialized position data or mix together multiple audio streams using the SAF binauralization library.
The sponsor provided full funding for the hardware, and is receiving both the hardware and the software final products. The codebase contains documentation about its different components and instructions on how to use it with the hardware.
§System Architecture
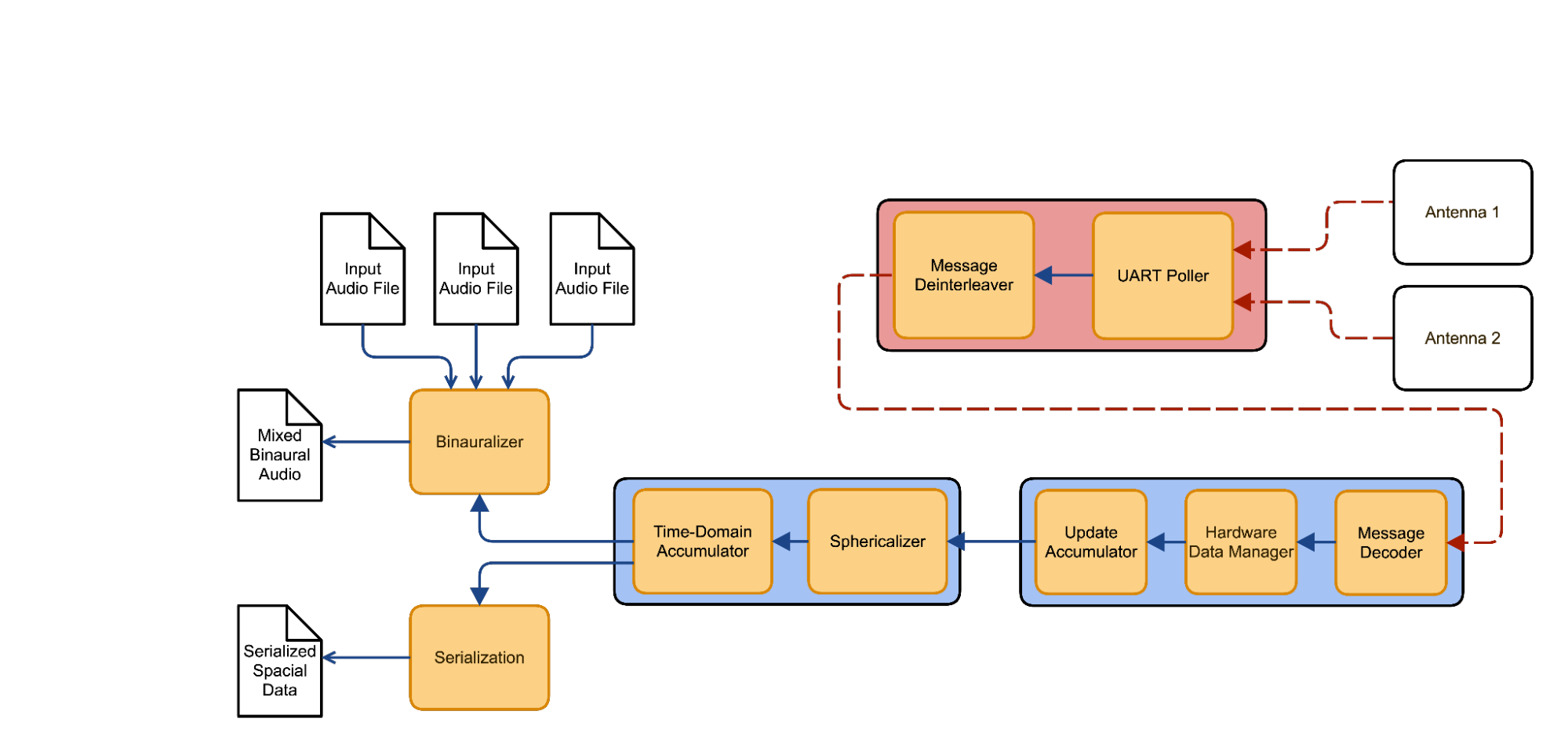
§Documentation
Once you have the codebase locally via git clone, run cargo doc --open to
generate a full webpage of the codebase documentation. Documentation for
the command line can be accessed via the --help flag:
cargo run --bin cybergrape --release -- --help
§Interface Design
Our startup interface is via the command line, which provides two options. The first, given information from the user, will record positional data according to the length of provided mono audio files and binauralize the audio files, according to the recorded positions, into a stereo audio file.
The following is an example command that samples position 40 times per
second, and expects an input of 2 audio files, x.wav and y.wav, with
sample rates of 44,100 gHz (this is the default value if --samp is not
provided), gains of 1, and ranges of 3 and 4, respectively. The final
binaural audio will be written to a file called out.wav.
cargo run --bin cybergrape --release -- --update 40 binaural --samp \
44100 -n 2 --outfile out.wav --gains 1 1 --ranges 3 4 --files x.wav \
y.wav
The second type of command allows a user to record positional data for an arbitrary length of time and encode it in our serial file format to a filename of the user’s choosing.
The following is an example command that samples position 40 times per second from 2 audio tags, and outputs the final serialized positional data to a file named out.grape.
cargo run --bin cybergrape --release -- --update 40 serial -n 2 -o out.grape
Upon running either of these startup commands successfully, a TUI prompt will appear resembling the following, at which point the user needs to select the CyberGrape listener block from their computer’s serial device list (not in the list in the image).
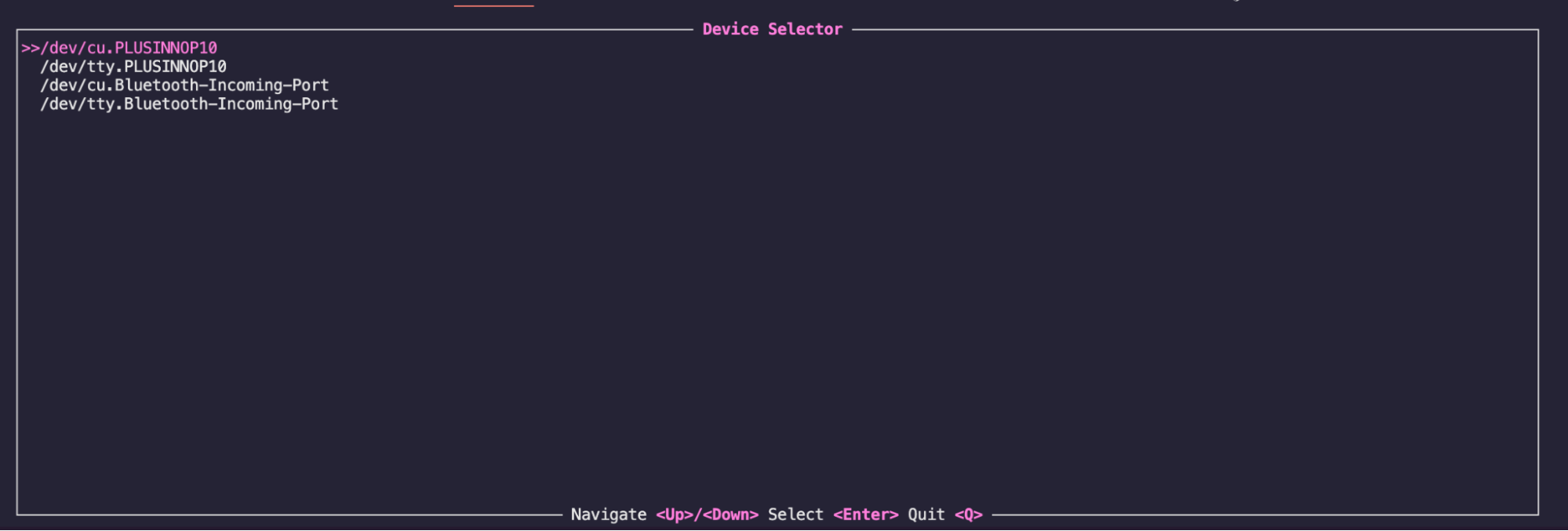
If in binaural mode, upon device selection, the system will then begin recording and continue to do so until the length of the longest audio file provided. Move those audio tags around!
If in serial mode, upon device selection, the system will record positional data until the user hits any key, at which point recording will cease.
§Milestone Timeline
§1. Hardware Block Designs and Prototypes
This is the hardware component, a network of physical blocks, that will use Bluetooth signals to generate raw positional and angle-of-arrival data for use by our software components.
-
Preliminary Design and CAD Model: Early February
-
Preliminary prototype: Early April
-
Final Hardware Bringup: Mid-April
Following the preliminary design, the hardware prototyping and bringup involved flashing firmware on the antenna boards and reading data off of the antenna boards using Raspberry Pi Pico W’s. Due to poor documentation of the antenna boards, this process took much longer than anticipated, which delayed its completion until mid-April.
§2. Hardware Data Manager
This is an internal process within the software system that manages communications between the Cyber Grape listener block and its sound source blocks.
-
Design Hardware Data Manager: Mid October
-
Write Mock Hardware: Late October
-
Implement Real Hardware Data Manager: Mid April
-
Plumbing from Hardware Data Manager to Hardware Localization Interface: Late April
Due to the hardware issues we experienced, the hardware data manager timeline also was affected. Once the hardware bringup was achieved, we interleaved data read from the antennas into messages on a Pico W, which our software interprets as position updates.
§3. Binauralization API
This is an internal software component that, given positional data from our hardware localization algorithm, will produce the final mixed spatial audio.
-
Design interface: Early December
-
Initial Implementation: Mid-February
-
Final Implementation: Mid-March
This module was implemented and tested early on. This module consists of a Rust wrapper that links an existing binauralization library written in C. Creating a safe interaction between the two languages is nontrivial, but the module was completed according to our original plan.
§4. Serialization Standard File Format and API
This is an internal software component that encodes interleaved positional information as read by the antennas in a custom serialized data format.
-
Design specification: Mid-February
-
Final API Implementation: Mid March
Given positional data provided by our hardware system, the serialization format encodes metadata about the positional data in a header, and encodes interleaved channels of positional data in binary for space efficiency. This milestone did not depend on the hardware bringup and was implemented on time.
§5. User Terminal Interface
This is a user-facing terminal interface, which will enable users to configure audio blocks, activate audio mixing mode, and select an output channel for the produced binauralized audio.
-
Ratatui interface design and preliminary implementation: Mid-April
-
Final implementation: Late April
This was a stretch goal that was not wholly realized due to hardware problems resulting in time constraints. We designed a robust commandline parser and included a smaller-scale selection TUI to configure the hardware system and record audio data intuitively. Further work could be done on providing a fuller TUI or a GUI for this system.
§Acceptance Testing
§Criterion 1: Exportable Serialization Format
We required that the serialization format encodes positional data correctly, is space-efficient, is exportable, and has clear documentation. This criterion passed all acceptance tests. We designed the format to be space-efficient by using a binary encoding and exportable via only requiring system knowledge of Rusty Object Notation. We implemented the format correctly, as confirmed by unit testing, and documented thoroughly.
§Criterion 2: Spatialization of Audio
We required the audio spatialization to meet the following criteria: provide audible sonic feedback of positional information, multi-channel support, and output on stereo. The testing process for this involved minute unit tests, along with end-to-end tests utilizing various audio samples and sets of positional data to ensure audio spatialization sounded as a user would expect.
§Criterion 3: Hardware Collection of Positional Data
We required that hardware blocks communicate with each other via Bluetooth, the Listener block and the central computer interface successfully, and the Hardware Data Manager to communicate positional data.
§Criterion 4: Low Latency Data Collection
This criterion required that we would be able to hear live feedback of audio spatialization with no audible delay. Due to a reduction in our project scope over the course of the semester due to time constraints, this acceptance test became not applicable. However, with some more work, this system could be adjusted to implement live audio feedback of the spatialization, since we incorporated this goal into the design of the system.
§Ethics and Social Impact
The vision for social impact of this project was to develop a spatial audio creation technology that is intuitive to everyone and easy to use, in addition to being accessible for those who cannot use a visual interface. In addition, this technology could be used to recreate synesthetic experiences.
There are not many ethical concerns to consider for this project, since it is an audio creation tool not intended for any particular purpose. However, legally, the project could be implicated in relation to intellectual property and protected audio content, if it is used to spatialize protected content without proper licensing. Clear guidelines stating the usage, distribution, and ownership of audio content created with this system would prevent the individuals or organization distributing this system from incurring any liability.
From a security perspective, the use of Bluetooth could be an avenue for malicious actors to eavesdrop on, disrupt, or hijack with their own messages, especially if the central computer is eventually connected to the listener block with a wireless connection.
§Reflection
This project had many triumphs and pitfalls to navigate. We successfully completed all the important points in our MVP and succeeded in creating a functional end-to-end system that reads positional data from hardware components and spatializes audio streams according to that input. Despite having to reduce our scope due to unforeseen challenges such as poor hardware documentation, scheduling conflicts, and long-term illness, we are proud of the technology we’ve built and the idea we’ve brought to life.
Guided by our sponsor, Professor James Intriligator, we designed the system to encompass more use cases than originally imagined, including recording positional data to a file format, and making sure the listener block was portable enough to be moved itself.
Our team consisted of four undergraduate senior Computer Science majors, Ayda Aricanli, Skylar Gilfeather, Liam Strand, and Tyler Thompson.
We all learned a great deal over the course of the project, both personally and technically. We often juggled how to balance work as a team over time, collectively manage a project of this scope, and choose a project that we were all equally interested in. For each of us, there were aspects of this project that none of us had ever attempted before—flashing hardware, Rust, how to correct soldering mistakes, and more.
Many thanks to Professor Intriligator for his guidance, Professor Lillethun for organizing the course, the entire team for pouring their time into this project over the past year, and to Tyler’s roommate Greg, for helping us with the hardware in a time of need.
§Appendix
We used the XPLR-AOA-1 Product summary to get an idea of the capabilities and limitations of the U-block AoA antennas.
The XPLR-AOA-1 and XPLR-AOA-2 explorer kits: Bluetooth direction finding User guide from U-blox was the primary source of information that was used to build up the hardware portion of the project.